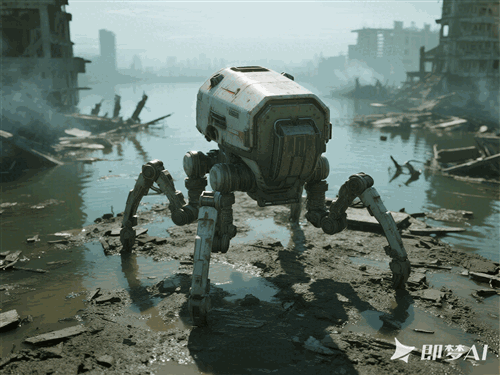
四足攀爬机器人
本发明公开了一种基于纳米微吸胶的柔性粘附足的设计方法,并基于此,设计了一种四足攀爬机器人,保证最大粘附效率的同时,实现最小脱附力。柔性粘附足的灵活性能,实现机器人在垂直和倒置面的运动,并实现转弯和横向攀爬。该发明减低了机器人在攀爬过程中的脱附力,还提升了攀爬速度和灵活性,扩展了攀爬机器人使用场景。

本发明公开了一种基于纳米微吸胶的柔性粘附足的设计方法,并基于此,设计了一种四足攀爬机器人,保证最大粘附效率的同时,实现最小脱附力。柔性粘附足的灵活性能,实现机器人在垂直和倒置面的运动,并实现转弯和横向攀爬。该发明减低了机器人在攀爬过程中的脱附力,还提升了攀爬速度和灵活性,扩展了攀爬机器人使用场景。
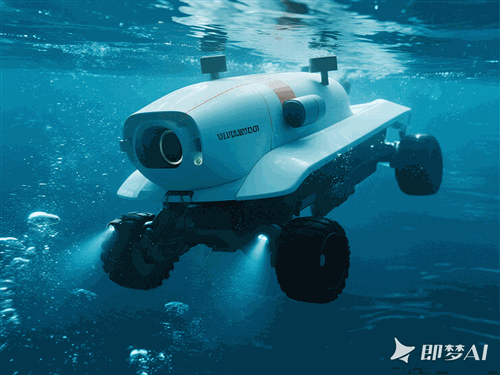
由微小型水下机器人及其配套的水面支持系统组成,水下机器人可靠泊水面支持系统完成数据传输,指令下载,无线充电等。水下机器人可搭载摄像头,水质传感器等载荷对监测水域进行测量,对养殖物的生长状态进行观察,进而评估正好养殖水域的健康状态。

1、机器人零部件:①研制的电机转矩密度超过国际最先进德国TQ电机30%以上,获教育部技术发明一等奖。②机器人器件部件,智能肌电仿生手、仿生眼稳像。 2、腿足式机器人:研发国际首个“走跑跳摔滚爬”多模态仿人机器人,获国家技术发明二等奖研发高动态四足机器人,跳跃高度达1.2m,国际上未见同类报道。 3、专用机器人:①工业巡检机器人;②家庭护理陪伴机器人;③柔韧性外骨骼。