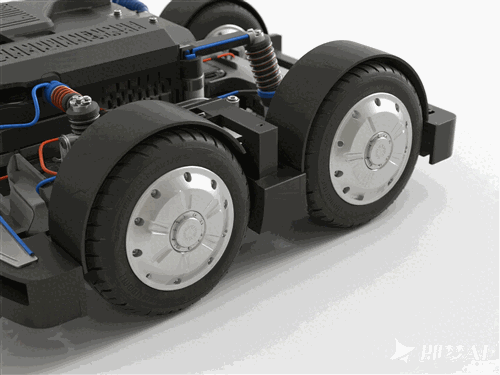
并联双球冠差动式全方位轮
专利名称:《并联双球冠差动式全方位轮》,类型:发明专利,授权号:ZL201410559048.6;技术优势:可实现灵活的全方位运动,结构简单, 运动灵活; 承载能力强,易于控制, 特别适合作为机器人运动平台的万向轮。依托该全方位轮开发的下肢移动康复机器人,适用于脑卒中偏瘫患者康复训练,助其重建步态、恢复行走能力;辅助下肢功能障碍者及老年人移动,提升行动灵活性与稳定性,适用于医疗及家庭场景。

专利名称:《并联双球冠差动式全方位轮》,类型:发明专利,授权号:ZL201410559048.6;技术优势:可实现灵活的全方位运动,结构简单, 运动灵活; 承载能力强,易于控制, 特别适合作为机器人运动平台的万向轮。依托该全方位轮开发的下肢移动康复机器人,适用于脑卒中偏瘫患者康复训练,助其重建步态、恢复行走能力;辅助下肢功能障碍者及老年人移动,提升行动灵活性与稳定性,适用于医疗及家庭场景。
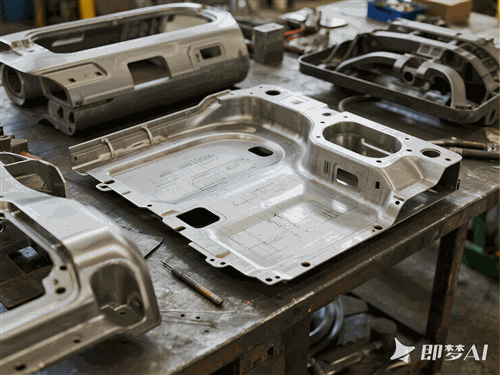
成果名称:《钣金件二维零件图缺陷修复》,类型:软件;技术优势:钣金件二维零件图原始数据中存在大量数据缺陷,如断线、重线及其他非有效图元等,不可直接用 于激光切割编程。人工修复难度大、费时费力、效率低下且容易出错。为解决这一问题,团队针对图中存在的数据缺陷进行总结分析,研究在AutoCAD环境下快速查找上述缺陷并自动修复的方法,并实现封闭圆孔的孔径标注及非有效图元的快速删除,开发了相应的插件,已成功应用于沈飞和贵飞相关项目中。
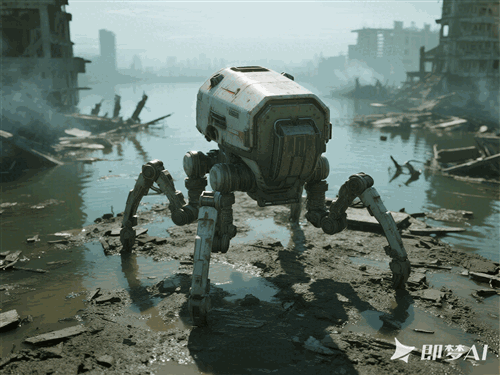
本发明公开了一种基于纳米微吸胶的柔性粘附足的设计方法,并基于此,设计了一种四足攀爬机器人,保证最大粘附效率的同时,实现最小脱附力。柔性粘附足的灵活性能,实现机器人在垂直和倒置面的运动,并实现转弯和横向攀爬。该发明减低了机器人在攀爬过程中的脱附力,还提升了攀爬速度和灵活性,扩展了攀爬机器人使用场景。
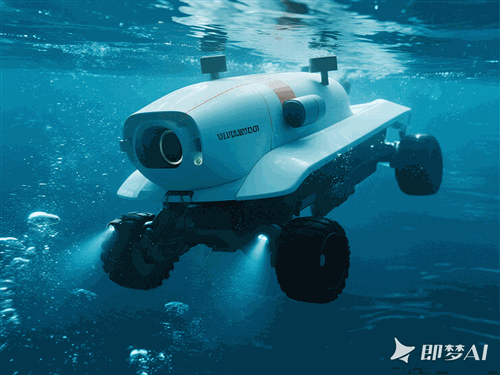
由微小型水下机器人及其配套的水面支持系统组成,水下机器人可靠泊水面支持系统完成数据传输,指令下载,无线充电等。水下机器人可搭载摄像头,水质传感器等载荷对监测水域进行测量,对养殖物的生长状态进行观察,进而评估正好养殖水域的健康状态。
1.国内首套万吨级氯化亚硕连续化生产工艺,产品纯度高、三废排放少,已推广3套; 2.加压法三聚氰胺合成工艺,技术路线成熟、安全可靠,工业化应用2套; 3.高纯氯化氢专利技术,确保产品纯度≥99.999%。

1.均热直回式流态化反应技术打破了国外在有机硅领域的技术封锁,推广应用17台套,年产值近百亿元; 2.环流式旋风分离系列专利技术使我国气固分离技术达到国际领先水平,推广应用1800余台套; 3.高效精馏洗涤技术实现工业含尘气超细颗粒的彻底去除,减排降耗效益显著,工业推广21台套。